hochschule 21 in Buxtehude entwickelt Inspektionsroboter
Forschungsprojekt mit der DESY geht in die spannende letzte Phase
Wenn Beschleunigeranlagen gewartet oder inspiziert werden müssen, kostet dies vor allem eins: wertvolle Forschungszeit. Die Anlagen können während des Betriebs aufgrund von Strahlenbelastung nicht betreten und müssen deswegen abgeschaltet werden. Bevor ein Wartungsteam die Arbeiten durchführen darf, muss der gesamte Beschleuniger von Spezialisten aufwendig freigemessen werden. Dies verringert die ohnehin knappe Zeit, die für Wartung, Inspektion, Fehlerdiagnostik und Reparatur zur Verfügung steht.
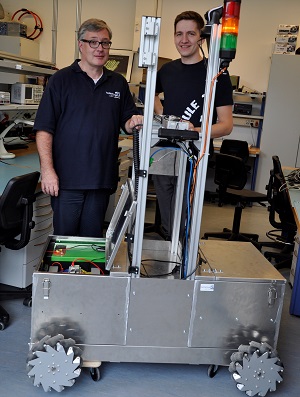
Im neuen Linearbeschleuniger des European XFEL, den die Deutsche Elektronen- Synchrotron (DESY), ein Forschungszentrum der Helmholtz-Gemeinschaft, derzeit in Hamburg baut, soll daher im Rahmen eines Forschungsprojekts ein Inspektionsroboter zur Strahlungsmessung zum Einsatz kommen. Dieser Inspektionsroboter wird aktuell als proof-of-concept vom Team des Studiengangs Mechatronik DUAL an der hochschule 21 in Buxtehude entwickelt.
Der European XFEL wird äußerst kurze und intensive Laserlichtblitze im Röntgenbereich erzeugen und die hellste Röntgenquelle der Welt sein. Diese weltweit einzigartige Anlage wird derzeit in unterirdischen Tunnelröhren eingebaut, die über eine Länge von mehr als drei Kilometern vom DESY-Gelände in Hamburg bis ins schleswig-holsteinische Schenefeld reichen. Im kommenden Jahr soll die Anlage den Forschungsbetrieb aufnehmen.
Das gemeinsame Forschungsprojekt mit dem Namen Inspektionsroboter für Beschleunigeranlagen (InRoBa) hatte seinen Start in 2015 und ist auf zwei Jahre angelegt. Das Team an der hochschule 21 besteht aus Prof. Dr.-Ing. Thorsten Hermes, Professor für Technische Informatik, dem wissenschaftlichen Mitarbeiter André Dehne B. Eng. und studentischen Hilfskräften.
Erfahrungen nutzen: Spacebot21
Bereits in den Jahren 2013 und 2015 hat die hochschule 21 im Studiengang Mechatronik DUAL erfolgreich an einem vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) ausgelobten Wettbewerb teilgenommen: Beim Spacebot Cup galt es, einen Roboter zu bauen und so zu programmieren, dass er in einem nachgestellten Szenario auf der Oberfläche eines fremden Planeten eine Reihe von anspruchsvollen Aufgaben schaffen kann, etwa die Erkundung und Kartierung des unbekannten Geländes, das Auffinden und greifen unterschiedlicher Gegenstände, den Rücktransport dieser Gegenstände zu einer Basisstation und schließlich die Montage zu einem Gesamtsystem.
„Diesen Rover konnten wir im HERA-Tunnel demonstrieren und so DESY als Kooperationspartner gewinnen“, berichtet Prof. Dr.-Ing Thorsten Hermes.
„Die Hauptaufgabe des robotischen Systems InRoBa besteht darin, autonom an bestimmten Punkten die Strahlung im Tunnel zu messen“, erläutert Andre Dehne den Forschungsauftrag. Dies sei beispielsweise notwendig, wenn Wartungsarbeiten anstehen. „Bislang wird diese Aufgabe von einem menschlichen Team erledigt, und die Anlage muss vorher komplett abgeschaltet werden. Um Zeit zu sparen und die Belastung für das Messpersonal zu minimieren, sollte der Tunnel ohne menschliches Eingreifen freigemessen werden.“, so Dehne.
Der neue Roboter soll es neben der Freimessung des Tunnels zusätzlich ermöglichen, In-Situ-Inspektionen ohne Unterbrechung des Beschleunigerbetriebs durchzuführen. Seine Aufgabe ist es, am Beschleuniger automatisch routinemäßig an vorgegebenen Messpositionen die Daten aufzunehmen oder bei Bedarf auch halbautomatisch den Beschleuniger abzufahren und dabei gezielt manuell zu messen. Die ermittelten Messwerte sind hierbei immer an eine Überwachungszentrale zu übermitteln. Von dort aus ist der aktuelle Status einsehbar und der manuelle Eingriff jederzeit möglich.
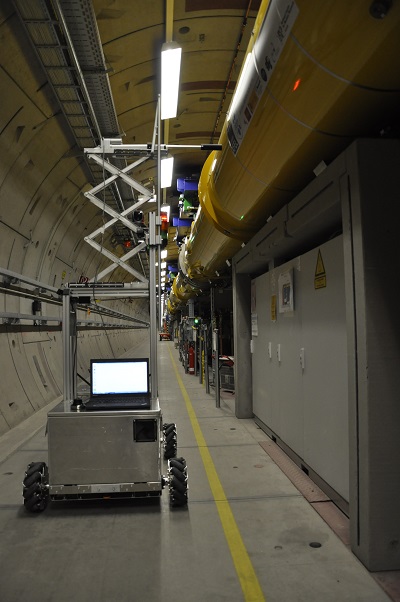
Auf Grund der zum Teil schwer zugänglichen und beengten räumlichen Gegebenheiten in einem Beschleunigertunnel wird der Roboter mit einer ausfahrbaren Messsonde ausgerüstet, die Messungen und Inspektionen bis zu 2,5 Meter Höhe und 0.5 Meter seitlich versetzt zur Roboterplattform ausführen kann.
Für die Navigation und zur Erfassung des eigenen Betriebszustands, zum Beispiel des Batteriestands oder der Temperatur, werden geeignete Sensoren in die Steuerung integriert. Der Einbau redundanter Technik versetzt die Plattform außerdem in die Lage, mögliche Ausfälle in der Steuerung, Kommunikation oder Navigation aufzufangen.
Erster Testlauf im fast fertigen Tunnel
Nach über einem Jahr Planung, Entwicklung und Implementierung der Grundfunktionen (Lokomotion, Manipulator, Lokalisation, Navigation, Redundanz, Energiemanagement), fand im Juni 2016 ein erster Testlauf im European XFEL- Beschleunigertunnel statt.
Hierbei konnten erste Ergebnisse hinsichtlich der Positionierung mit Hilfe von Landmarken/Tunnelmarkierungen gewonnen werden. „Es hat sich gezeigt, dass die Lokalisation mehr als zufriedenstellend funktioniert“, so André Dehne.
Über die Sensorik wurde angezeigt, dass der an sich schnurgerade Tunnel eine starke Krümmung aufweist. "Die hierbei verwendeten Laserscanner waren nicht exakt zueinander ausgerichtet, daher die fehlerhafte Angabe. Dieser und weitere kleinere Mängel werden nach der Dokumentation sukzessive behoben, sodass sie bei einem weiteren Testlauf nicht mehr auftreten können", berichtet der Mechatronik- Ingenieur.
In der letzten Phase des Projekts, die mit dem vierten Quartal 2016 beginnt, werden sowohl die Ergebnisse des proof-of-concepts vorgestellt als auch die entsprechende Dokumentation erzeugt.
„Wir denken bereits jetzt schon an eine Fortführung des Projekts, bei dem der Schritt von einer Machbarkeitsstudie hin zu einem seriennahen Prototyp erfolgt. Dabei können dann Verbesserungen und auch Erweiterungen realisiert werden, die über die bisherige Messeaufgabe hinausgehen“, sagt Prof. Hermes.
Der komplette Projektbericht ist in der Schriftenreihe der hochschule 21 technical report erschienen.

Prof. Dr.-Ing.
Thorsten Hermes
Technische Informatik
- Vizepräsident
- Fachbereichsleitung Technik
- Stv. Studiengangsleitung Ingenieurwesen Mechatronik DUAL
- Raum 329
- hermes(at)hs21.de
- +49 4161 648-161